2022年3月時点で最新のOpenAuto Pro 15がリリースされていましたので、こちらにアップデートしてみます。忘備録も兼ねて新規インストールにて^^;
OpenAuto Proを使えば、ラズベリーパイ(ラズパイ)の画面にスマホのAndroidAutoTMを簡単に表示させることができるので、自作カーナビや車載PCを考えている方におすすめです。
以前は一度購入すれば永年アップデート無料でしたが、2021年7月1日以降は1年間のアップデートに変更されていますのでご注意ください。
なお、定価USD$29ですが、購入の際は、クーポンコード「siru-tabi」を入力すると5%引きで購入できます!

ラズベリーパイのハードウェア構成については過去投稿を参照ください。


RPI imageファイルの入手
OpenAuto Proを新規購入するか、メールでアップデートの依頼を送信すると、ダウンロードリンク先が書かれたメールが返ってきます。2.8GB「bluewavestudio-openauto-pro-release-15.0.zip」というのファイルをダウンロードし、解凍すると6.7GBの「bluewavestudio-openauto-pro-release-15.0.img」が出来上がります。
ちなみに、新規インストールでなくアップデートのみの場合は18MBの「openauto_update_package.zip」だけで済みます。
SDカードの準備
起動時間短縮のためある程度高速なものが良いと思います。今回はSanDisk Extreme UHS-I V30 A2 128GBにしました。


SDカードへの書き込み
imgファイルからSDカードに起動ディスクを作れるソフトを使用します。WindowsPCの私の場合「Rufus」を使いました。SDカードを接続した状態で、imgファイルを選択するかドラッグ&ドロップ、スタートボタンを押すだけの簡単操作です。

ラズパイ起動
出来上がったSDカードをラズベリーパイに挿入して電源を入れます。
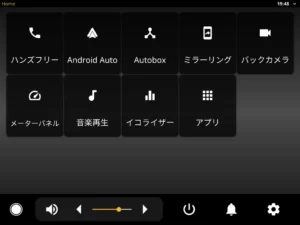
OpenAuto Proの起動画面でしばらく待つと、言語の選択「日本語」、サービス利用規約「承認する」、シリアル番号「xxxx-xxxx-xxxx-xxxx-xxxx-xxxx-xxxx」(ライセンスメールに記載の28桁の英数字とハイフン)を入力すると、下記の画面に移行し使えるようになります。ついに日本語が選択できるようになりましたが、表示にまだ慣れません。
各種設定
あっけなくOpenAuto Proが起動してしまいますが、まずはRaspberry PI OS (Buster)の設定が必要です。



Wi-fiの接続設定
デスクトップ画面右上にある電波アイコンからSSID等の設定ができます。または、コマンドラインから「/etc/wpa_supplicant/wpa_supplicant.conf」を編集してください。
ctrl_interface=DIR=/var/run/wpa_supplicant GROUP=netdev
update_config=1
country=JP
network={
ssid="SSID"
psk="PASS"
key_mgmt=WPA-PSK
}画面,オーディオ,UARTの設定
「/boot/config.txt」を編集。
デフォルトのユーザー名:pi パスワード:raspberryとなっていますので、お早めの変更をお勧めします。
ロケーション設定 国「Japan」、言語「Japanese」、タイムゾーン「Tokyo」
ソフトウェアのアップデートと追加(任意)
車載用ではタッチパネルはあってもキーボードやマウスは無いことが多いでしょうから、外部から遠隔操作ができるツールを使うのが良いです。ほかにも使いたいソフトなども併せてインストールしておきます。
SSH…デフォルトで有効になっていました
VNC…設定-RaspberryPiの設定のインターフェイスタブから「有効」を選択
samba
コマンドラインからインストールする場合は
sudo apt-get install samba既にインストールされているソフトウェアのアップデート
sudo apt update
sudo apt full-upgradeその他各自の必要に応じてインストール
sudo apt-get install foxtrotgps bluetooth mplayer
sudo apt-get install wmctrl gpsd gpsd-clients pps-tools
sudo apt-get install libatlas-base-dev libsdl2-ttf-2.0 libsdl2-image-2.0 libsdl2-mixer-2.0
sudo apt-get install libhdf5-dev libatlas-base-dev libjasper-dev libqtgui4 libqt4-test libwebp-dev libilmbase-dev libopenexr-dev libavcodec-dev libavformat-dev libswscale-dev libharfbuzz-dev
sudo apt-get install python3-opencv libopencv-dev
sudo apt-get install python3-gi gir1.2-wnck-3.0
pipのバージョンが古いとインストールがエラーになってしまうものがあるらしいので、まずはpipのアップグレードから(18.1→22.0.4)。opencv-pythonは頑張ってコンパイル(?)を試みるものの数時間後にエラーになってしまうので、上のapt-getでpython3-opencvを入れるほうが無難で早いです。
sudo pip3 install --upgrade pip setuptools wheel
sudo pip3 install kivy wiringpi
sudo pip3 install opencv-pythonソフトウェアの自動起動(任意)
「piremotecontroll」というサービス名で、ILM入力やLCDバックライトの明るさ調整、ステアリングリモコンのスイッチ入力を受け付けるようにしています。
sudo systemctl daemon-reload
sudo systemctl start piremotecontroll
sudo systemctl enable piremotecontrollスマホとの接続
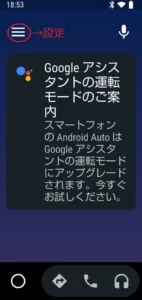
私はラズパイをスマホテザリングにWi-fi接続させて使っています。この場合Android Autoのヘッドユニットサーバーを起動しておくと、OpenAuto ProもそのままWi-fi接続できるので便利です。ヘッドユニットサーバーを起動するにはデベロッパーモードにする必要がありますので、下図のように設定します。ヘッドユニットサーバー起動の設定はスマホ本体やAndroidAutoアプリの再起動まで有効ですので、一度設定しておけばしばらく有効になっています。





ハンズフリー通話にはbluetoothを使っています。こちらもペアリング等の設定をしておくと良いでしょう。
かれこれ1年近く使っていますが、トンネルなどで自分の位置が行方不明になったりバックモニタの反応が悪かったり、細い道を案内されたりとあと一歩なところもあるものの、GoogleMapと同じくいつも最新の地図を使えるメリットも大きいかと思います。


コメント